B-Splines curves#
Let \((\mathbf{P}_i)_{ 0 \leqslant i \leqslant n}\in \mathbb{R}^d\) be a sequence of control points. Following the same approach as for Bézier curves, we define B-Splines curves as
Definition 5 (B-Spline curve)
The B-spline curve in \(\mathbb{R}^d\) associated to \(T=(t_i)_{0\leqslant i \leqslant n + p + 1}\) and \((\mathbf{P}_i)_{ 0 \leqslant i \leqslant n}\) is defined by :
Remark 9
The use of open knot vector leads to an interpolating curve at the endpoints.
Properties of B-Splines curves#
We have the following properties for a B-spline curve:
If \(n=p\), then \(\mathcal{C}\) is a Bézier-curve,
\(\mathcal{C}\) is a piecewise polynomial curve,
The curve interpolates its extremas if the associated multiplicity of the first and the last knot are maximum (i.e. equal to \(p+1\)),
Invariance with respect to affine transformations,
B-Spline curves are affinely invariant; i.e. the image curve \(\Phi(\sum_{i=0}^n \mathbf{P}_i N_i^p)\) of a B-Spline curve, by an affine mapping \(\Phi\), is the B-Spline curve having \(\left( \Phi(\mathbf{P}_i) \right)_{0 \le i \le n}\) as control points and the same knot vector,
strong convex-hull property: if \(t_j \leq t \leq t_{j+1}\), then \(\mathcal{C}(t)\) is inside the convex-hull associated to the control points \(\mathbf{P}_{j-p},\cdots,\mathbf{P}_{j}\),
local modification : moving \(\mathbf{P}_{j}\) affects \(\mathcal{C}(t)\), only in the interval \([t_j,t_{j+p+1}]\),
the control polygon is a linear approximation of the curve. We will see later that the control polygon converges to the curve under knot insertion and degree elevation (with different speeds).
Variation diminishing: no plane intersects the curve more than the control polygon.
Derivative of a B-spline curve#
Using the derivative formula for B-spline, we can compute the derivative of a B-Spline curve:
where we introduced the first backward difference operator \(\nabla \mathbf{P}_i := \mathbf{P}_i - \mathbf{P}_{i-1}\).
Example 25
we consider a quadratic B-Spline curve with the knot vector \(T=\{000~\frac{2}{5}~\frac{3}{5}~111 \}\).
We have \(\mathcal{C}(t) = \sum_{i=0}^{4} {N_{i}^{2}}^{\prime}(t) \mathbf{P}_i \), then
where
the B-splines \(\{ N_{i}^{1},~0 \leq i \leq 3\}\) are associated to the knot vector \(T^{\ast}=\{00~\frac{2}{5}~\frac{3}{5}~11 \}\).
# needed imports
import numpy as np
import matplotlib.pyplot as plt
# importing bsplines utilities
from bsplines_utilities import find_span, all_bsplines, point_on_bspline_curve
Examples#
Example 26
knots = [0., 0., 0., 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [1., 1., 0.]
P[:, 1] = [0., 1., 1.]
nx = 101
xs = np.linspace(0., 1., nx)
Q = np.zeros((nx, 2))
for i,x in enumerate(xs):
Q[i,:] = point_on_bspline_curve(knots, P, x)
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-0.2, 1.2, -0.2, 1.2])
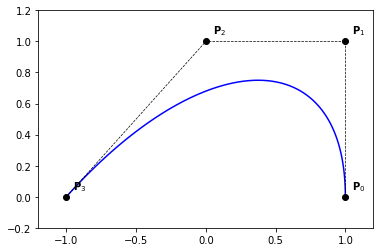
Example 27
knots = [0., 0., 0., 0., 1., 1., 1., 1.]
degree = 3
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [1., 1., 0., -1.]
P[:, 1] = [0., 1., 1., 0.]
nx = 101
xs = np.linspace(0., 1., nx)
Q = np.zeros((nx, 2))
for i,x in enumerate(xs):
Q[i,:] = point_on_bspline_curve(knots, P, x)
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-1.2, 1.2, -0.2, 1.2])
Example 28
knots = [0., 0., 0., 0.25, 0.5, 0.75, 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [0., 1., 1., -2., -1., -2.]
P[:, 1] = [.5, -1., 1., 1., 0., -1.]
nx = 101
xs = np.linspace(0., 1., nx)
Q = np.zeros((nx, 2))
for i,x in enumerate(xs):
Q[i,:] = point_on_bspline_curve(knots, P, x)
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-2.2, 1.3, -1.2, 1.4])
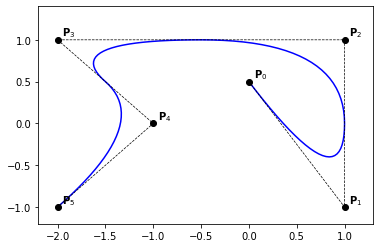
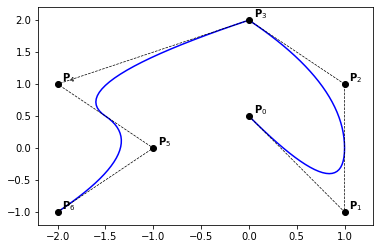
Example 29
knots = [0., 0., 0., 0.25, 0.5, 0.5, 0.75, 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [0., 1., 1., 0., -2., -1., -2.]
P[:, 1] = [.5, -1., 1., 2., 1., 0., -1.]
nx = 101
xs = np.linspace(0., 1., nx)
Q = np.zeros((nx, 2))
for i,x in enumerate(xs):
Q[i,:] = point_on_bspline_curve(knots, P, x)
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-2.2, 1.3, -1.2, 2.2])
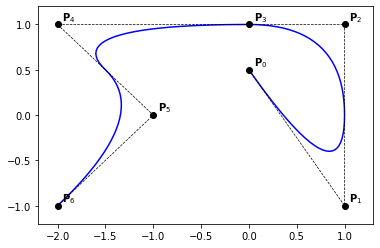
Example 30
knots = [0., 0., 0., 0.25, 0.5, 0.5, 0.75, 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [0., 1., 1., 0., -2., -1., -2.]
P[:, 1] = [.5, -1., 1., 1., 1., 0., -1.]
nx = 101
xs = np.linspace(0., 1., nx)
Q = np.zeros((nx, 2))
for i,x in enumerate(xs):
Q[i,:] = point_on_bspline_curve(knots, P, x)
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-2.2, 1.3, -1.2, 1.2])
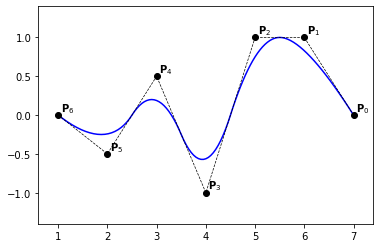
Example 31
knots = [0., 0., 0., 0., 0., 0., 0., 1., 1., 1., 1., 1., 1., 1.]
degree = 6
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [7., 6., 5., 4., 3., 2., 1.]
P[:, 1] = [0., 1., 1., -1., .5, -.5, 0.]
nx = 101
xs = np.linspace(0., 1., nx)
Q = np.zeros((nx, 2))
for i,x in enumerate(xs):
Q[i,:] = point_on_bspline_curve(knots, P, x)
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([0.6, 7.4, -1.4, 1.4])
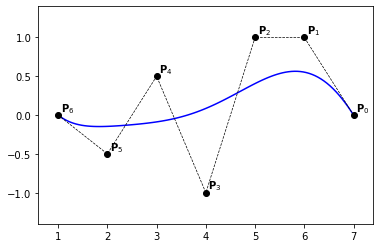
Example 32
knots = [0., 0., 0., .2, .4, .6, .8, 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [7., 6., 5., 4., 3., 2., 1.]
P[:, 1] = [0., 1., 1., -1., .5, -.5, 0.]
nx = 101
xs = np.linspace(0., 1., nx)
Q = np.zeros((nx, 2))
for i,x in enumerate(xs):
Q[i,:] = point_on_bspline_curve(knots, P, x)
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([0.6, 7.4, -1.4, 1.4])
Rational B-Splines (NURBS) curves#
We recall that NURBS are defined as
where \(w_i > 0, \forall i \in \left[0, n \right]\) are non-negative real numbers, called the weights.
NURBS curves are then defined as
Notice that a NURBS curve in \(\mathbb{R}^d\) can be described as a NURBS curve in \(\mathbb{R}^{d+1}\) using the control points:
\(\textbf{P}^{\omega}_i = ( \omega_i \textbf{P}_i, \omega_i )\)
This remark is used for the evaluation and also to extend most of the B-Splines fundamental geometric operations to NURBS curves.
Remark 10
Although there is a function point_on_nurbs_curve to evaluate NURBS curves, we make use of an explicit call to the spline version in this notebook.
Examples#
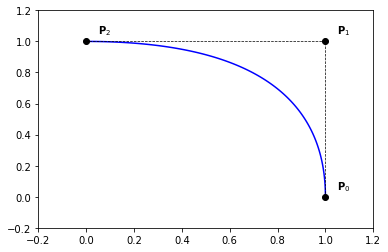
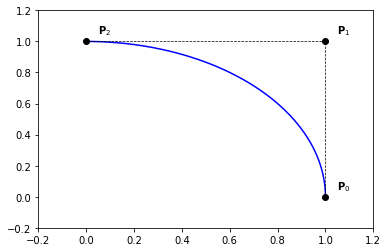
Example 33 (Quarter circle)
knots = [0., 0., 0., 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [1., 1., 0.]
P[:, 1] = [0., 1., 1.]
# weights
s2 = 1./np.sqrt(2)
W = np.zeros(n)
W[:] = [1., s2, 1.]
# weithed control points in 3D
Pw = np.zeros((n,3))
for i in range(0, n):
Pw[i,:2] = W[i]*P[i,:]
Pw[i,2] = W[i]
nx = 200
xs = np.linspace(0., 1., nx)
Qw = np.zeros((nx, 3))
for i,x in enumerate(xs):
Qw[i,:] = point_on_bspline_curve(knots, Pw, x)
Q = np.zeros((nx, 2))
Q[:,0] = Qw[:,0]/Qw[:,2]
Q[:,1] = Qw[:,1]/Qw[:,2]
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-0.2, 1.2, -0.2, 1.2])
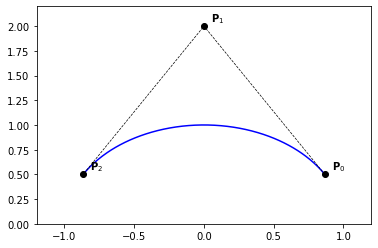
Example 34 (Circular arc of \(120°\))
knots = [0., 0., 0., 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
a = np.cos(np.pi/6.)
P[:, 0] = [ a, 0., -a]
P[:, 1] = [.5, 2., .5]
# weights
W = np.zeros(n)
W[:] = [1., 1./2., 1.]
# weithed control points in 3D
Pw = np.zeros((n,3))
for i in range(0, n):
Pw[i,:2] = W[i]*P[i,:]
Pw[i,2] = W[i]
nx = 200
xs = np.linspace(0., 1., nx)
Qw = np.zeros((nx, 3))
for i,x in enumerate(xs):
Qw[i,:] = point_on_bspline_curve(knots, Pw, x)
Q = np.zeros((nx, 2))
Q[:,0] = Qw[:,0]/Qw[:,2]
Q[:,1] = Qw[:,1]/Qw[:,2]
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-1.2, 1.2, .0, 2.2])
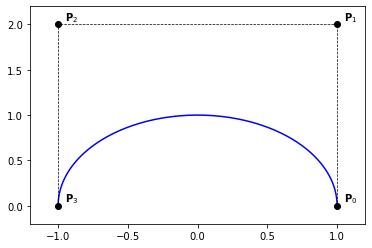
Example 35 (half circle)
knots = [0., 0., 0., 0., 1., 1., 1., 1.]
degree = 3
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [1., 1., -1., -1.]
P[:, 1] = [0., 2., 2., 0.]
# weights
W = np.zeros(n)
W[:] = [1., 1./3., 1./3., 1.]
# weithed control points in 3D
Pw = np.zeros((n,3))
for i in range(0, n):
Pw[i,:2] = W[i]*P[i,:]
Pw[i,2] = W[i]
nx = 200
xs = np.linspace(0., 1., nx)
Qw = np.zeros((nx, 3))
for i,x in enumerate(xs):
Qw[i,:] = point_on_bspline_curve(knots, Pw, x)
Q = np.zeros((nx, 2))
Q[:,0] = Qw[:,0]/Qw[:,2]
Q[:,1] = Qw[:,1]/Qw[:,2]
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(0, n):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
plt.axis([-1.2, 1.2, -.2, 2.2])
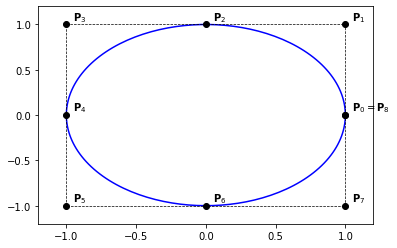
Example 36 (Circle as 4 arcs)
We already saw how to construct a circular arc (with angle = \(\frac{\pi}{2}\), using Bézier curves.
Constructing a circular arc can be done in different ways. In this example, we consider a B-Spline curve as a composite of 4 Bézier curves.
knots = [0., 0., 0., .25, .25, .5, .5, .75, .75, 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
P[:, 0] = [1., 1., 0., -1., -1., -1., 0., 1., 1.]
P[:, 1] = [0., 1., 1., 1., 0., -1., -1., -1., 0.]
# weights
s2 = 1./np.sqrt(2)
W = np.zeros(n)
W[:] = [1., s2, 1., s2, 1., s2, 1., s2, 1.]
# weithed control points in 3D
Pw = np.zeros((n,3))
for i in range(0, n):
Pw[i,:2] = W[i]*P[i,:]
Pw[i,2] = W[i]
nx = 200
xs = np.linspace(0., 1., nx)
Qw = np.zeros((nx, 3))
for i,x in enumerate(xs):
Qw[i,:] = point_on_bspline_curve(knots, Pw, x)
Q = np.zeros((nx, 2))
Q[:,0] = Qw[:,0]/Qw[:,2]
Q[:,1] = Qw[:,1]/Qw[:,2]
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(1, n-1):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
# plot P_0 = P_8
x,y = P[0,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_0 = \mathbf{P}_8$')
plt.axis([-1.2, 1.2, -1.2, 1.2])
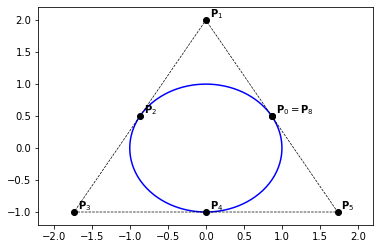
Example 37 (Circle as 3 arcs)
We already saw how to construct a circular arc (with angle = \(120°\), using Bézier curves.
In this example, we consider a B-Spline curve as a composite of 3 Bézier curves.
knots = [0., 0., 0., 1./3., 1./3., 2./3., 2./3., 1., 1., 1.]
degree = 2
n = len(knots) - degree - 1
P = np.zeros((n, 2))
a = np.cos(np.pi/6.)
P[:, 0] = [ a, 0., -a, -2*a, 0., 2*a, a]
P[:, 1] = [.5, 2., .5, -1., -1., -1., .5]
# weights
W = np.zeros(n)
W[:] = [1., 1./2., 1., 1./2., 1., 1./2., 1.]
# weithed control points in 3D
Pw = np.zeros((n,3))
for i in range(0, n):
Pw[i,:2] = W[i]*P[i,:]
Pw[i,2] = W[i]
nx = 200
xs = np.linspace(0., 1., nx)
Qw = np.zeros((nx, 3))
for i,x in enumerate(xs):
Qw[i,:] = point_on_bspline_curve(knots, Pw, x)
Q = np.zeros((nx, 2))
Q[:,0] = Qw[:,0]/Qw[:,2]
Q[:,1] = Qw[:,1]/Qw[:,2]
plt.plot(Q[:,0], Q[:,1], '-b')
plt.plot(P[:,0], P[:,1], '--ok', linewidth=0.7)
for i in range(1, n-1):
x,y = P[i,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_{' + str(i) + '}$')
# plot P_0 = P_6
x,y = P[0,:]
plt.text(x+0.05,y+0.05,'$\mathbf{P}_0 = \mathbf{P}_8$')
plt.axis([-2.2, 2.2, -1.2, 2.2])